近日,大连海事大学轮机工程学院宋永欣教授团队在深海柔性触觉感知领域取得研究进展,相关研究成果以“Self‐Powered Underwater Pressing and Position Sensing and Autonomous Object Grasping with a Porous Thermoplastic Polyurethane Film Sensor”和“Multi-Hierarchically Porous SWNTs-TPU/C-WPU Composite Film for Underwater Self-Powered Multi-Modal Tactile Information Sensing”为题连续发表于《Advanced Functional Materials》(影响因子19),该研究得到国家自然科学基金的支持。
触觉感知能力是水下机器人通过机械手开展精细化和交互式作业的关键部件,柔性触觉传感器可以随机械手灵活弯曲,和刚性机械手构成“刚柔并济”的类人结构,因此能够“类人化”感知目标物的表面纹理、模量、形状等多维物理信息,从而在复杂水下环境中如辅助机器人完成抓取、识别、操控等任务,显著提升其自主性与操作精度。当前深海柔性触觉传感器大都采用封装的方式,用于实现水密封,但高静水压力会使密封后的柔性材料变硬,从而变硬而失效。因此,亟需通过原理和结构创新研究,突破现有技术瓶颈,推动深海触觉感知技术的发展。
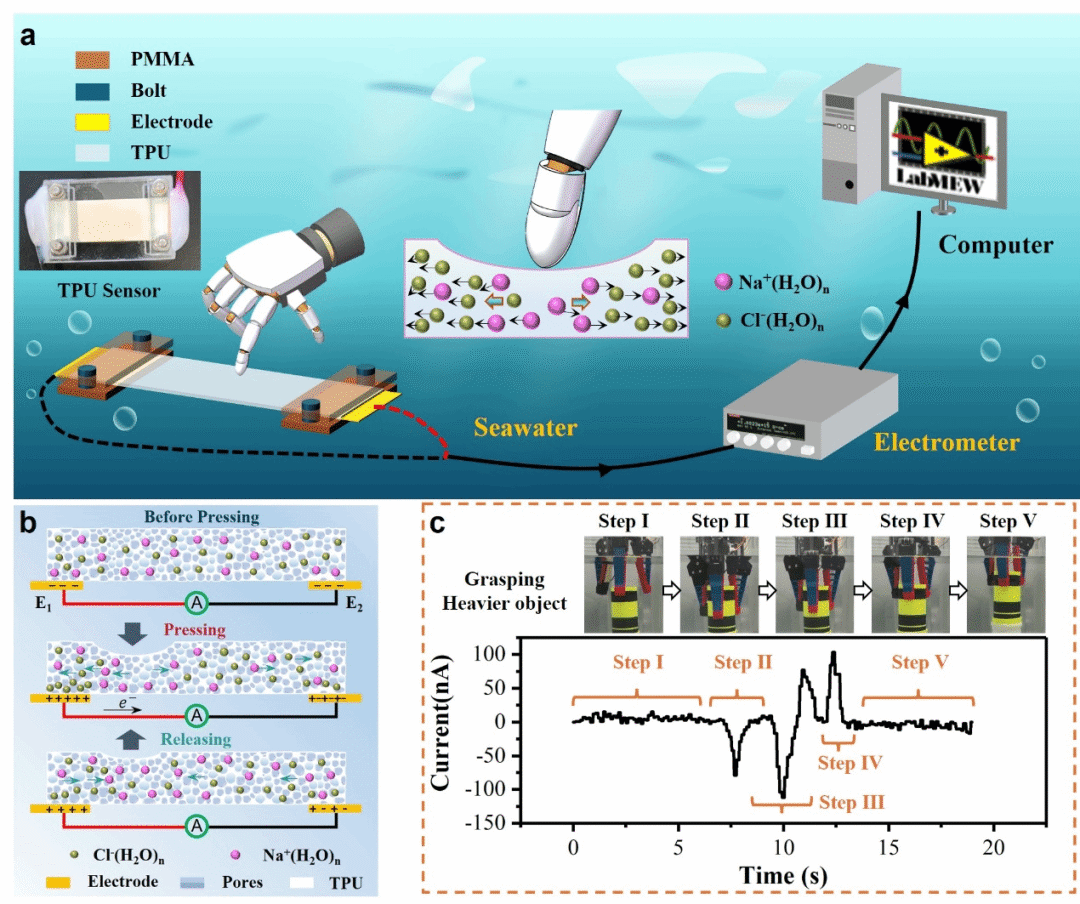
针对耐高静水压力问题,该团队创新性地提出了仿生式静压自平衡学术思路,开发了一种基于多孔热塑性聚氨酯弹性体(TPU)薄膜,并且将薄膜与海水直接接触,变“密封”为“开式”,多孔结构使海水能够自由渗透进薄膜内部,薄膜内外压强相同从而本质实现了静压自平衡。此外,利用触压驱动海水中离子在多孔薄膜中的定向移动产生电信号,传感单元无需通电,实现了自驱动感知。作为典型应用展示,该团队将该多孔TPU传感器集成至三指机械手指中,实现了对不同重量物体的自主抓取(图1)。
图1 基于多孔TPU薄膜的水下触觉传感器。a)实验系统;b)传感器触压感知机理;c)水下不同重物的自主抓取
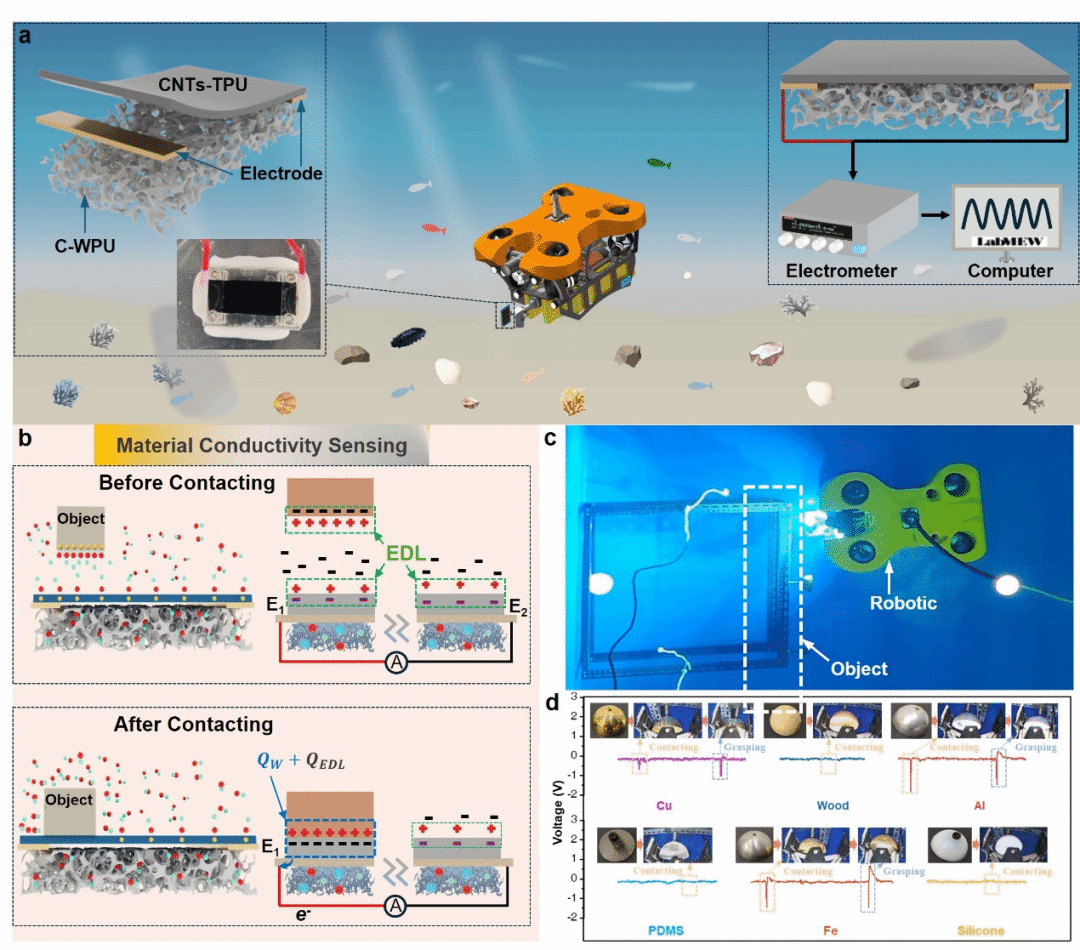
为进一步提高传感器的灵敏度和多模态信息感知能力,研究团队近期开发了一种基于多层复合薄膜的水下触压传感器(Advanced Functional Materials, 2025, e09538),仅通过一次触摸便能实现物体电导率、硬度、接触压力和位置等多模态信息的获取。该传感器通过单壁碳纳米管掺杂热塑性聚氨酯(SWNTs-TPU)薄膜区分物体导电性,利用含羧基多孔水性聚氨酯(C-WPU)薄膜受压产生离子电流,同步感知接触压力和位置以及物体的硬度。该传感器灵敏度为1.2 kPa-1,响应和恢复时间分别为150和530 ms,压力检测范围45-625 kPa,在100米水深下信号仅衰减10.54%。该传感器即使在含油、沉积物以及化学污染的海水中,传感器仍可稳定输出信号。此外,将该传感器安装在遥控水下机器人(ROV)机械手上,成功实现了水下物体材质和硬度的可靠识别。
图2 多孔SWNTs-TPU/C-WPU复合薄膜传感器。a)触压感知实验系统;b)物体电导率检测原理;c)ROV水下抓取物体;d)水下物体识别过程,包括铜(Cu)、铝(Al)、铁(Fe)等金属,以及木材、聚二甲基硅氧烷(PDMS)、硅胶等非金属
 (0)
(0)